- 1신규확진 38명, 8월11일 이후…
- 2해경 "北피격 공무원 3억 넘는 …
- 3한의협 "의대생 국시 허용해야, …
- 4"부모님 유골함 깨졌다" 접촉 사…
- 5정은경은 도대체 우리에게 돈을 얼…
- 6병원 감염, 잡히지 않는 '경로 …
- 7해경 "피격 공무원 월북".."인…
- 8'서지현 인사보복' 안태근.. 파…
- 9"아들 의혹 관련 보좌관 전화 거…
- 10연합뉴스 생애 첫 등교에 바이러스…
KAIST 연구팀 '3차원 표면 스프레이 코팅 기술' 개발
압력·마찰 구분해내…"저비용·대량생산 가능"

(대전=연합뉴스) 이재림 기자 = 로봇도 피부를 가질 수 있는 시대가 더 가까이 다가왔다.
한국연구재단은 한국과학기술원(KAIST) 스티브 박·김정 교수 연구팀이 자극을 구분할 수 있는 3차원 표면 코팅 로봇 피부 기술을 개발했다고 12일 밝혔다.
인간과 흡사한 기능을 가진 휴머노이드 구현은 로봇 분야 핵심 연구과제 중 하나다.
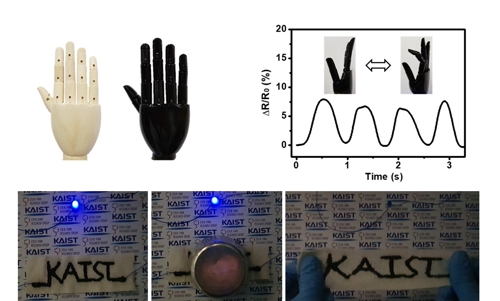
KAIST 연구팀은 로봇의 복잡한 형상에 균일하게 코팅할 수 있는 로봇 피부를 만들었다.
균일한 코팅은 로봇 피부에 가해진 자극을 더 정확히 측정할 수 있게 해주는 핵심 기술이다.
연구 과정은 어려웠어도 결과물 응용은 간단하다.
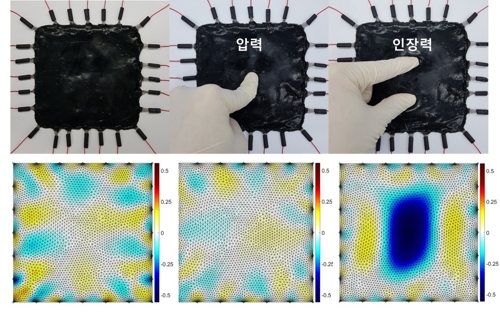
연구팀이 개발한 용액을 원하는 물체에 뿌린 뒤 굳히면 신축성 있는 다공성 구조 로봇 피부가 생긴다.
로봇 피부 용액은 탄소나노튜브, 물, 탄성중합체를 혼합해 만들었다.
저비용·대면적·대량생산 요건을 갖췄다.
이 로봇 피부는 물리적인 압력과 마찰을 구분해낸다.
수직 압력과 마찰에 대해 로봇 피부 내부구조가 각각 다르게 변형되기 때문이다.
꼬집거나 늘리는 것처럼 로봇 피부에 마찰(인장력)을 가할 경우 기공 내부에 미세 균열이 발생해 저항이 증가하게 된다.
압력이 가해지면 기공이 닫히면서 구조체 내 전류 흐름 경로 변화가 최소화한다.
다시 말해 이 로봇 피부는 압력에는 둔감하고 마찰에는 민감한 특성을 보인다.
연구팀은 실제 활용 가능성을 높이고자 전기임피던스영상법(EIT)을 로봇 피부 기술과 결합했다.
의료영상 기법의 하나인 EIT는 전극을 소재에 붙여 저항 분포 형상을 촬영하는 이미징 기술이다.
복잡한 전기 배선 없이 로봇 피부에 마찰이 가해지는 곳을 정확히 측정할 수 있다고 연구팀은 설명했다.
스티브 박 교수는 "기존에 연구된 여러 로봇 피부와 달리 비교적 싼 비용으로 대량 생산할 수 있다"며 "로봇 피부 상용화에 한 걸음 가까워질 수 있는 원천 기술"이라고 말했다.
연구는 과학기술정보통신부·한국연구재단 기초연구사업(신진연구) 지원으로 수행했다.

성과를 담은 논문은 ACS 나노(ACS Nano) 8월 28자 표지에 실렸다.
KAIST 오진원 석사과정생과 양준창 박사과정생이 논문 1저자다. 박현규 석사과정생이 공저자로 이름을 올렸다.
walden@yna.co.kr
<저작권자(c) 연합뉴스, 무단 전재-재배포 금지>2018/09/12 12:00 송고
